
Recent Publications
-

Direct Positioning Estimation Beyond the Constellation Using Falcon Gold Data Collected on Highly Elliptical Orbit
Kirsten Strandjord and Faith Cornish
The long-term objective of this research is to develop methods to navigate through cis-lunar space while not relying on the limited availability of the Deep Space Network (DSN). Such methods would utilize the weak signals from the antenna sidelobes of the well-established GNSS constellation. Prior work in utilizing weak GNSS signals in the urban environment within Direct Positioning Estimation (DPE) methods inform our research as we process real data collected on board a satellite on a highly elliptical orbit (HEO) reaching altitudes beyond those of the GPS constellation. We use the techniques that we have implemented and developed in the GNSS degraded environment of the urban canyon to further investigate the use of these limited and weak signals for navigation beyond the constellation. Specifically, we will be implementing direct positioning estimation or collective detection technique to make use of these limited and weak signals. To test our techniques we use real data collected from the Falcon Gold satellite, which collected data above the constellation on a HEO orbit.
-

Evaluating Navigation Augmentation with LTE in the Urban Signal Environment
Andrew Brevick and Kirsten Strandjord
Tall buildings that block, reflect, or diffract signals challenge GPS positioning in urban environments, resulting in positioning errors. This paper explores the use of communication signals, such as long-term evolution (LTE) signals, as signals of opportunity (SOP) leveraged to aid navigation performance. Data collected during a driving experiment in the urban center of Denver, Colorado is processed using a carrier phase tracking architecture, which provides accumulated Doppler ranging (ADR) measurements. This data is applied to the problem of characterizing LTE small cell transmitter clock and position states, a critical first step in use for navigation. Batch LLS phase profile comparisons and shadow matching techniques are used, and their combined application matches LTE transmitter locations to candidates in a known database.
-

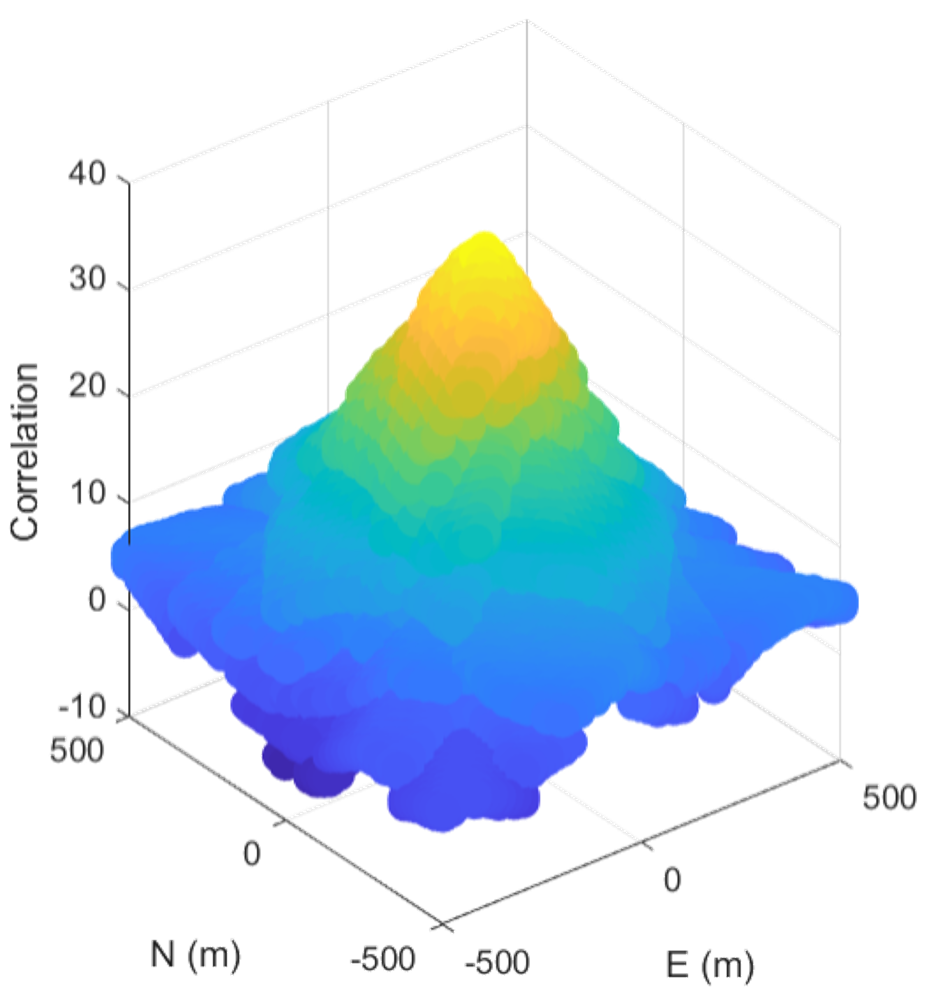
Algorithms for Mapping the Urban Signal Environment for Navigation of Ground Vehicle Operations
Emma Zeller and Kirsten Strandjord
GPS positioning in urban environments is challenging as tall buildings often block, reflect, or diffract signals. These signals then reach the receiver via a non-line-of-sight (NLOS) path, which may result in positioning errors such that a vehicle using conventional GPS will need to slow down or reroute its course. Improvements can be made through urban mapping that allows the specularity and visibility to be predicted at any location of interest within the mapped environment. Building footprints are raytraced to create a database of visibility and specular skyplots, which display the expected sky visibility and likelihood of specular reflections at any given location. Direct position estimation (DPE) is an alternative positioning approach that directly computes a multi-dimensional spatial correlogram that can be analyzed to determine the most likely user location. This approach requires a priori information about satellites, user location and clock bias, which are all readily established in urban environments. A driving experiment was performed with an equipped vehicle in downtown Denver CO. By examining several regions of interest with varying degrees of conventional GPS positioning success, the use of DPE as well as incorporating visibility and specularity predictions has been shown to improve positioning estimates.
-

Evaluating the Urban Signal Environment for GNSS and LTE Signals
Kirsten Strandjord, Y. Jade Morton, Pai Wang
This paper introduces a three-dimensional building model in conjunction with visibility predictions to simulate the conditions of conducting an experiment in a dense urban environment and evaluates the ability to use long term evolution (LTE) signals for positioning and navigation. In particular, this paper focuses on the direct line-of-sight (DLOS) visibility between LTE small cells and an equipped vehicle traveling along the city streets of Denver, CO. Using the DLOS visibility predictions, an interacting multiple model (IMM) filter that uses extended Kalman filters (EKFs) similar to the one developed in [1] was implemented and executed in a simulation of the urban environment while incorporating the DLOS visibility predictions to determine the accuracy of locating the LTE small cell locations.
-

Improved urban navigation with shadow matching and specular matching
Kirsten L. Strandjord, Penina Axelrad, Shan Mohiuddin
As the dependence of Global Navigation Systems (GNSS) increases, so does a growing demand for GNSS accuracy in urban environments. This research aims to improve navigation in these environments by integrating non-line-of-sight signals, building models, and measured signal to noise ratios in ways not typically used in GNSS positioning. We propose a technique of combining elements of shadow matching, non-line-of-sight signal prediction through ray tracing, and collaborative navigation. A specularity metric is developed, which predicts the likelihood of building reflections resulting in non-line-of-sight signal reception, and is used in conjunction with shadow matching techniques to improve positioning. A framework for implementing these approaches is presented and demonstrated using improved positioning techniques built and tested using real-world data collected in urban surroundings.
-
Improved Urban Navigation with Direct Positioning and Specular Matching
Kirsten Strandjord, Penina Axelrad, Dennis M. Akos, Shan Mohiuddin
This paper introduces an assisted GPS direct positioning estimation (DPE) technique in conjunction with visibility and specularity matching techniques based on 3D building information for positioning in an urban environment. Results from static experiments in the city of Denver, CO are presented. The locations are chosen to demonstrate conditions where GPS signals reach the receiver in several different ways: a direct-line-of-sight (DLOS) path only; a combination of DLOS and non-line-of-sight (NLOS) paths known as multipath; and a strictly NLOS path with buildings blocking the DLOS path. Use of signal visibility and specular reflection predictions within the DPE can improve positioning. We show that when we explicitly account for visibility and have some indication of specularity the RMS position error is reduced from approximately 30 to 10 meters.
-

Framework and Techniques for Cooperative Group Situational Awareness in Urban Environments
Kirsten Strandjord and Penina Axelrad
Society has become increasingly dependent upon GPS-based positioning even in urban environments where dense, high-rise landscapes create challenging signal blockages and unintentional interference. This paper builds upon a previously developed tool, designed to enhance GPS situational awareness by integrating multi-user GPS receiver position and signal reports with predictions, reference orbits and clocks, and potentially other reference data reported to a regional supervisor or monitor. The current work focuses specifically on extending this capability to the challenging urban environment. Predictions of the effects of building obstructions and reflections on GPS signal reception are constructed and compared with experimental data sets collected with cell phones in Denver, Colorado. With the framework and interface structure established, the tool can be used to analyze data within an urban environment.
-

A Framework for Regional GNSS Situational Awareness
Kirsten L. Strandjord and Penina Axelrad
Reliance on GPS for Position, Navigation, and Timing (PNT) to support mission or safety critical functions requires robust monitoring and verification to assure that reported PNT solutions are accurate and reliable. We are developing a GNSS situational awareness tool to gather, analyze, and display real-time reports of the positions and satellites tracked by a cooperative group of participants. Reported paths and satellite tracking are compared to planned routes and expected visibility accounting for GNSS orbits and surrounding terrain. A graphical user interface allows a supervisor to view the motion of the participants and reports from their devices simultaneously in map and time displays, including alerts that highlight discrepancies in their motion and satellite tracking. The system is demonstrated in two experiments with two participants equipped with cell phones, traveling through natural canyons and mountainous terrain near Boulder, Colorado.
-

Improved Prediction of GPS Satellite Clock Variations Based on Daily Repeat
Kirsten Strandjord and Penina Axelrad
High precision estimates of GPS satellite clock errors reveal systematic sub-daily clock bias variations on the order of one nanosecond. The low noise levels in the Rubidium Atomic Frequency Standards (RAFS) onboard GPS IIR, IIR-M, and IIF satellites provide visibility of these small, but systematic behaviors. Prior studies have reported on this phenomenon and sought to characterize the specific frequency components present and to identify potential causes of the observed periodic variations. Our research focuses on the repeatability of the clock variations and the potential for applying a corrective clock residual profile from one day to the next. Results are presented for several case studies including analysis of the performance of the prediction approach applied to data from all GPS IIR, IIR-M, and IIF clocks for a one month period in July 2015. The profile corrections are found to be very effective in predicting the systematic behavior of the clocks, resulting in reduction of RMS errors by over 35% in Block IIF satellites operating RAFS. This approach offers a valuable contribution towards improving the fidelity of predictive satellite clock models for real-time GPS position, navigation, and timing applications.